Un ingeniero especializado en calidad que trabaja en una planta de partes automotrices monitorea la longitud de los árboles de levas. Tres máquinas producen los árboles de levas en tres turnos cada día. El ingeniero mide cinco árboles de levas de cada máquina durante cada turno.
El ingeniero crea una gráfica Xbarra-R para cada máquina para monitorear la longitud de los árboles de levas.
- Abra los datos de muestra, LongÁrbolLevas.MWX.
- Elija .
- En la lista desplegable, seleccione Todas las observaciones para una gráfica están en una columna e ingrese Máquina 1 Máquina 2 Máquina 3.
- En Tamaños de los subgrupos, ingrese ID subgrupo.
- Haga clic en Opciones de Xbarra-R.
- En la ficha Pruebas, seleccione 1 punto > K desviaciones estándar desde la línea central (Prueba 1), K puntos consecutivos en el mismo lado de la línea central (Prueba 2) y K puntos consecutivos dentro de 1 desviación estándar de la línea central (cualquier lado) (Prueba 7).Si no está seguro de qué pruebas se aplican en su situación específica, utilice las pruebas 1, 2 y 7 cuando establezca por primera vez los límites de control con base en los datos. Después de establecer los límites de control, puede usar los los valores conocidos de esos límites y la Prueba 7 ya no es necesaria.
- Haga clic en Aceptar en cada cuadro de diálogo.
Interpretar los resultados
Minitab crea tres gráficas Xbarra-R, una gráfica para cada máquina. El ingeniero examina la gráfica R primero, porque si la gráfica R muestra que la variación del proceso no está bajo control, entonces los límites de control en la gráfica Xbarra son inexactos.
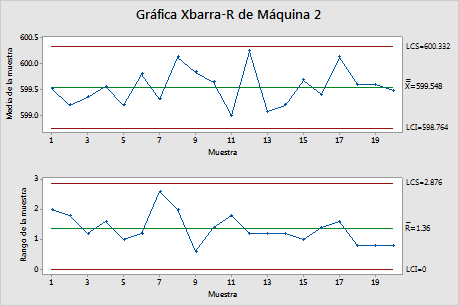
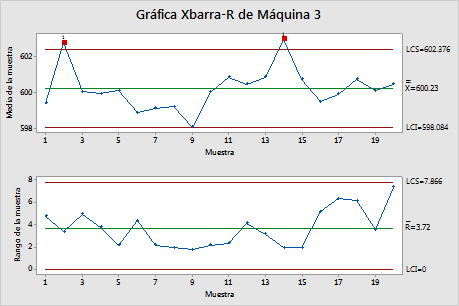
Las gráficas R para las tres máquinas muestran que la variación del proceso está bajo control. Ningún punto está fuera de control y todos los puntos se encuentran dentro de los límites de control en un patrón aleatorio.
Las gráficas Xbarra muestran que la máquina 2 está bajo control, pero las máquinas 1 y 3 no lo están. En la gráfica Xbarra de la máquina 2, ningún punto está fuera de control. Sin embargo, la máquina 1 tiene un punto fuera de control y la máquina 3 tiene dos puntos fuera de control.
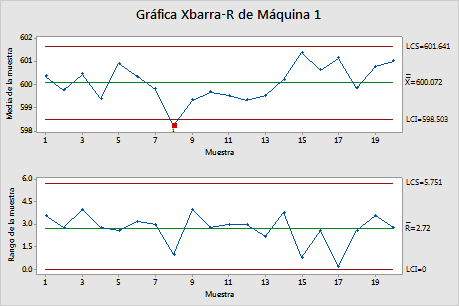
Resultados de la prueba para la gráfica Xbarra de Máquina 1
| PRUEBA 1. Un punto fuera más allá de 3.00 desviaciones estándar de la línea central. |
|---|
| La prueba falló en los puntos: 8 |
Resultados de la prueba para la gráfica Xbarra de Máquina 3
| PRUEBA 1. Un punto fuera más allá de 3.00 desviaciones estándar de la línea central. |
|---|
| La prueba falló en los puntos: 2, 14 |