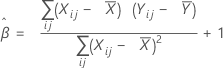
Pour les données exactes, chaque solution, , du système suivant des équations maximise la vraisemblance.
où :
Les erreurs types sont des écarts types de l'estimation du paramètre. Les erreurs types sont calculées comme la racine carrée de l'élément diagonal correspondant de l'inverse de la matrice des informations de Fisher.
Notation
Terme
Description
Yi
temps d'arrêt pour le ie système
Tij
je temps de défaillance pour le ie système
ni
nombre d'événements pour le ie système
N
nombre de systèmes
Maximum de vraisemblance (données d'intervalle)
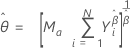
Pour les données d'intervalle, les estimations du maximum de vraisemblance, , satisfont les équations suivantes :
Les erreurs types sont des écarts types de l'estimation du paramètre. Les erreurs types sont calculées comme la racine carrée de l'élément diagonal correspondant de l'inverse de la matrice des informations de Fisher.
Notation
Terme
Description
Yi
temps d'arrêt pour le ie système
tij
bornes d'intervalle pour le ie système
ki
nombre de défaillances pour le ie système
Nij
nombre de défaillances dans un intervalle
N
nombre total de systèmes (dans chaque courbe de croissance)
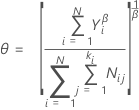
Maximum de vraisemblance conditionnelle
où :
L'erreur type pour est :
où
avec mi = ni - 1 si Yi = Tini ou sinon mi = ni
Notation
Terme
Description
Yi
temps d'arrêt pour le ie système
Tij
je temps de défaillance pour le ie système
ni
nombre d'événements pour le ie système
N
nombre total de systèmes (dans chaque courbe de croissance)
 , du système suivant des équations maximise la vraisemblance.
, du système suivant des équations maximise la vraisemblance.

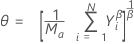

 , satisfont les équations suivantes :
, satisfont les équations suivantes : 


 est :
est :